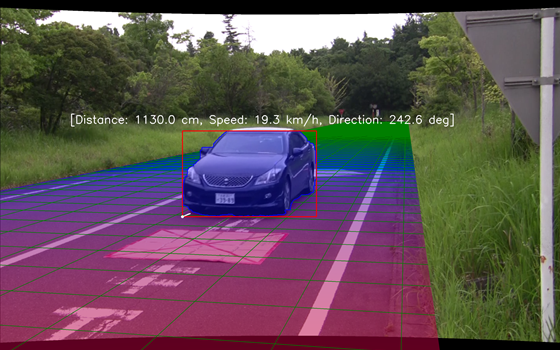
This is a project of doctor course student to reconstruct three-dimensional space from in-vehicle camera images. With the rapid development of deep learning technology, automated driving of automobiles has become a reality. Current advanced driver assistance systems, including ADAS, use a combination of millimeter wave radar, LiDAR, and ultrasonic sonar in addition to camera images to recognize the space around the vehicle, and there are problems with sensor accuracy and cost.
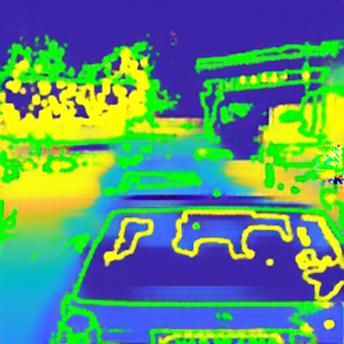
Therefore, with the goal of using a monocular camera for spatial recognition around a vehicle, this project is researching technologies for reconstructing 3D space using in-vehicle camera images, depth inference from monocular camera images, recognition of surrounding traffic, and robust recognition of signs.