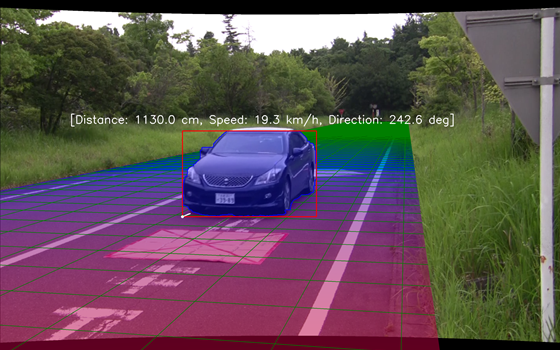
社会人博士の研究プロジェクトで、車載カメラ映像から三次元空間を再構築する技術を研究しています。深層学習技術の急速な発展により自動車の自動運転が現実味を帯びてきました。現在のADASをはじめとする高度運転支援システムでは、カメラ画像に加えてミリ波レーダーや、LiDAR、超音波ソナーなどを組み合わせることによって車両周辺の空間認知を行っており、センサの精度やコストの問題がありました。
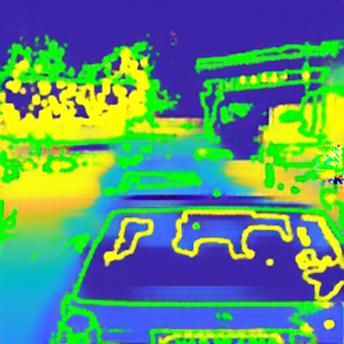
このため、本プロジェクトでは、車両周辺の空間認知を単眼カメラで行うことを目標として、車載カメラ画像による三次元空間の再構築や、単眼カメラ画像からの深度推論、周辺交通の認識や標識のロバストな認識を行う技術を研究しています。